MAQUET
Servo-i丄Servo-s
丂Siemens Elema幮乮僗僄乕僨儞乯偺乽僒乕儃儀儞僠儗乕僞乿偼丄愭恑惈偲崅婡擻偑昡壙偝傟偰恖岺屇媧婍偺悽奅昗弨婡偺抧埵傪妋棫偟偰偄偭偨楌巎揑僽儔儞僪偱偁傞丅崱擔偱偼昗弨揑側惂屼朄偱偁傞揹巕僒乕儃惂屼傪嵟弶偵妋棫偟偨恖岺屇媧婍偱傕偁傞丅埑偲僼儘乕忣曬偵婎偯偄偰媧婥僶儖僽偲屇婥僶儖僽傪揹巕揑偵僼傿乕僪僶僢僋僒乕儃惂屼偡傞偺偼丄儊僇僯僇儖惂屼偑庡棳偱偁偭偨摉帪偲偟偰偼偲偰傕夋婜揑偱偁偭偨丅乽僱僘儈偐傜徾傑偱乿偺僉儍僢僠僼儗乕僘偑屩帵偡傞傛偆偵丄姵幰懳徾偼怴惗帣傛傝惉恖傑偱傪庣旛斖埻偲偡傞嬃堎揑側惈擻傪桳偟偰偄偨丅
丂Servo 900偺奐敪偼1960擭戙偵巒傑傝丄1971擭偵偼弌壸偑奐巒偝傟偨丅1976擭偵偼丄900B偵敪揥偟偰SIMV偑晅壛偝傟偨丅1980擭偵偼900C偑敪攧偝傟乮
Servo900c偺奜娤幨恀乯丄偙偺摉帪偵
PSV丄PCV偲偄偆崱擔偱偼晄壜寚偺埑姺婥儌乕僪偑幚梡壔偝傟偨丅1991擭偵偼丄Servo-300傪敪攧偟乮Servo300a偺幨恀乯丄PRVC(Pressure Regulated Volume Control)丄VS(Volume Support)丄SIMV(Press.Contr.)+PSV側偳偺怴悽戙偺埑姺婥儌乕僪偵壛偊偰丄廬棃偼怴惗帣儌乕僪偵偍偄偰晄壜擻偲偄傢傟偨僩儕僈乕惈擻乮PTV乯傗丄怴惗帣儌乕僪偱偼昁恵偲偄傢傟偰偄偨掕忢棳偵棅傜偢僨傿儅儞僪婡擻偩偗偱懳墳偡傞惈擻傪妋棫偟偨丅1995擭偵偼Servo-300A偑捛壛偝傟偰丄Control mode偲Support mode偑帺摦揑偵愗傝懼傢傞婡擻(Automode)傪採彞偟偨丅1997擭偵偼庛揰偱偁偭偨僌儔僼傿僢僋婡擻傕Servo screen 390乮僆僾僔儑儞乯偵傛偭偰嫮壔偟偨丅偙偺傛偆偵僒乕儃偺楌巎偼屇媧儌乕僪偺敪揥巎偦偺傕偺偱偁傞丅偟偐偟丄偝偟傕偺揱愢揑側servo 900僔儕乕僘傕2003擭偵偼斕攧傪廔椆偟偨丅屻宲婡偱偁偭偨Servo300乮1991擭乣2003擭乯偺惢昳庻柦偼堄奜偵傕抁偔900C偲摨帪偵斕攧廔椆偟偨丅偙傟偼2003擭偵Siemens Life Suport Systems偑GETINGE AB偵攦廂偝傟偨偨傔偱傕偁傞丅偪側傒偵MAQUET偼傕偲傕偲僪僀僣偺夛幮偱偁傞偑丄僗僄乕僨儞偺GETINGE AB偑MAQUET傪攦廂偟丄Siemens Life Suport Systems傪攦廂偟偨屻偵丄僋儕僥傿僇儖働傾晹栧傪MAQUET偵摑堦偟偨偺偱丄MAQUET偺幮柤傪姤偵懻偔傛偆偵側偭偨丅2003擭埲崀偼惗嶻偺崌棟壔偑偍偙側傢傟丄Servo-i偺傒偑斕攧偝傟偰偄傞丅2005擭傛傝
楑壙婡庬傪搳擖偡傞栚揑偱Servo-s偑敪攧偝傟偨丅偙傟偼扨弮偵掅壙奿懷偺婡庬傪懙偊傞偲偄偆塩嬈忋偺棟桼偐傜惗傑傟偨婡庬偱偁傞偑丄幚偼丄撪晹峔憿偼Servo-i偲傎傏摨偠偱偁傝丄偙傟傜偼僴乕僪偲僜僼僩傪嫟桳偟偰偄傞丅Servo-i偲Servo-倱偺崻杮揑側嵎偼奼挘儃乕僪傪憰拝偱偒傞偐斲偐偱偁傝丄幚幙揑偵偼NAVA偑壜擻偐斲偐偑憡堘揰偱偁傞丅尰峴僶乕僕儑儞偱偼VS偩偗Servo-s偼晄壜偱偁傞偑丄偙傟偼塩嬈忋偺堄恾揑側惂尷偱偁傞丅崱屻偵惂尷偑夝彍偝傟傞壜擻惈偑偁傞丅偙傟偼丄偙傟傑偱Servo-s偵堄恾揑偵PRVC儌乕僪傪搵嵹偟偰偄側偐偭偨偺偲摨偠偱偁傞丅
丂Servo-i偱偼丄偦傟傑偱偼庛揰偲尵傢傟偰偄偨屇婥懁偺傾僫儘僌曽幃偺僼儘乕僩儔儞僗僨儏乕僒偑僨僕僞儖幃偺挻壒攇僩儔儞僕僢僩曽幃偵曄峏偝傟偰丄偝傜偵崅惛搙偐偮崅怣棅惈偵側偭偨丅Servo-i偵偼彫帣梡丄惉恖梡丄儐僯僶乕僒儖乮彫帣丄惉恖偺椉曽乯偺俁庬椶偺儌僨儖偑梡堄偝傟偰偄傞丅PCV丆PRVC丆VS丆BiVent丆NIV側偳偼僆僾僔儑儞埖偄偱昁梫側傕偺傪慖戰峸擖偡傞傛偆偵側偭偰偄傞丅幚偺偲偙傠杮懱偵偼嵟弶偐傜僼儖婡擻偺僜僼僩偑搵嵹偝傟偰偄傞丅僆僾僔儑儞傪峸擖偟偰婡擻惂尷傪夝彍偟偰傕傜偆偲丄偙傟傜偺婡擻傪棙梡偱偒傞巇慻傒偵側偭偰偄傞丅僜僼僩僂僃傾Ver4.0埲崀偱偼NAVA傕僆僾僔儑儞愝掕偝傟偰偄傞丅偙傟偼怘摴撪偵棷抲偟偨僙儞僒乕偱墶妘枌偺嬝揹埵傪懆偊傞偙偲偵傛傝丄屇媧嬝偺摥偒偱婥摴撪埑傗僼儘乕偑擇師揑偵曄壔偡傞慜偵丄偝傜偵堦曕憗偄僞僀儈儞僌偱媧婥丒屇婥傪曔懆傞偙偲偑壜擻偵側偭偨丅尰嵼偼Ver5.0偑嵟怴偱偁傞丅2013擭偵側傝Servo-u偑敪攧偝傟偨丅庡側夵椙揰偼儐乕僓乕僀儞僞乕僼僃乕僗偱丄iPad偺傛偆側崅惛嵶僞僢僠僷僱儖曽幃偑嵦梡偝傟偨乮
Servo-u偺幨恀乯丅
丂
俀丏惈擻
1)棙梡偱偒傞儌乕僪
丂Servo-i丂丂丂丂丂丂丂丂丂丂丂丂Servo-s
------------------------------------------------------
丂Volume Control(VC)丂丂丂丂丂丂 VC
丂Pressure Control(PC))丂丂丂丂丂PC
丂PRVC丂丂丂丂丂丂丂丂丂丂丂丂丂 PRVC
丂Vomume Support(VS)
丂Pressure Support(PS)/CPAP丂丂丂PS/CPAP
丂SIMV(VC)+PS丂丂丂丂丂丂丂丂丂丂SIMV(VC)+PS
丂SIMV(PC)+ PS丂丂丂丂丂丂丂丂丂 SIMV(PC)+PS
丂SIMV(PRVC)+PS丂丂丂丂丂丂丂丂丂SIMV(PRVC)+PS
丂Bi-Vent丂丂丂丂丂丂丂丂丂丂丂丂Bi-Vent
丂NAVA
丂NIV VC丂丂丂丂丂丂丂丂丂丂丂丂 NIV VC
丂NIV PS丂丂丂丂丂丂丂丂丂丂丂丂 NIV PS
丂NIV NAVA
------------------------------------------------------
丂Automode
丂+PEEP丂丂丂丂丂丂丂丂丂丂丂丂 +PEEP
丂
2)婎杮僨乕僞乕
嵟戝媧婥僈僗棳検
丂 嫮惂姺婥.........198 LPM
丂 PSV..................198 LPM
嵟戝嫮惂姺婥悢..........150 BPM
嵟戝SIMV夞悢........... 60 BPM
丂
俁丏惂屼夞楬丄惂屼婡峔
丂Servo-300偱偼丄偦傟偧傟偵MPU傪搵嵹偡傞偍屳偄偵撈棫偟偨惂屼儃乕僪傪傾僫儘僌怣崋偱楢実偟丄MPU偵傛傞拞墰張棟僔僗僥儉傪旔偗偨摿庩側僔僗僥儉偵側偭偰偄偨丅偙傟偼僨僕僞儖婍婡偑帩偮摿桳偺婋尟惈偵攝椂偟偨偆偊偺愝寁偱丄MPU偺朶憱偱僔僗僥儉慡懱偑掆巭偡傞偺傪杊偄偱偄偨偑丄僶乕僕儑儞傾僢僾傪崲擄偵偡傞婡峔偱偁偭偨丅偝偡偑偵Servo-i偼堦斒揑側儅僀僋儘僾儘僙僢僒偵傛傞拞墰惂屼偵側偭偨丅
2)婡夿揑婡峔偺摿挜
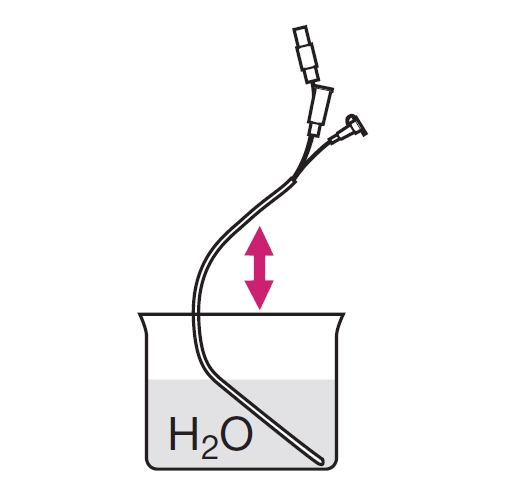
(1)媧婥僈僗丄屇婥僈僗偲傕偵岥尦偺僼儘乕僩儔儞僗僨儏乕僒傪巊傢偢偵怴惗帣懳墳偲偟偨偺偼嬃堎揑側媄弍偱偁傞丅偟偐傕峀斖埻偺懳徾偵埨掕偟偨僈僗惂屼傪峴偊傞偺偼戩墇偟偨媄弍偱偁傞丅偟偐傕僼儘乕僩儕僈乕偺嵟崅姶搙偼0.05LPM偲偙傟傕嬃堎揑偱偁傞丅偝傜偵墳摎惈傪夵慞偡傞栚揑偱Y僺乕僗偱偺寁應傪偡傞Y僙儞僒乕僆僾僔儑儞傕梡堄偝傟偰偄傞丅
(2)恖岺屇媧婍偺屇婥宯偺僈僗夞楬偼柵嬠偱偒偰摉慠偱偁傞偑丄媧婥宯傑偱傕姰慡偵暘夝愻忩丒柵嬠偱偒傞偺偼僔乕儊儞僗幮偩偗偺揱摑偱偁傞丅備偊偵僈僗夞楬偼偲偰傕僔儞僾儖偱偁傞丅偟偐偟丄偦偺戙彏偲偟偰懡偔偺僶僋僥儕傾僼傿儖僞傪徚栒晹昳偲偟偰徚旓偡傞丅
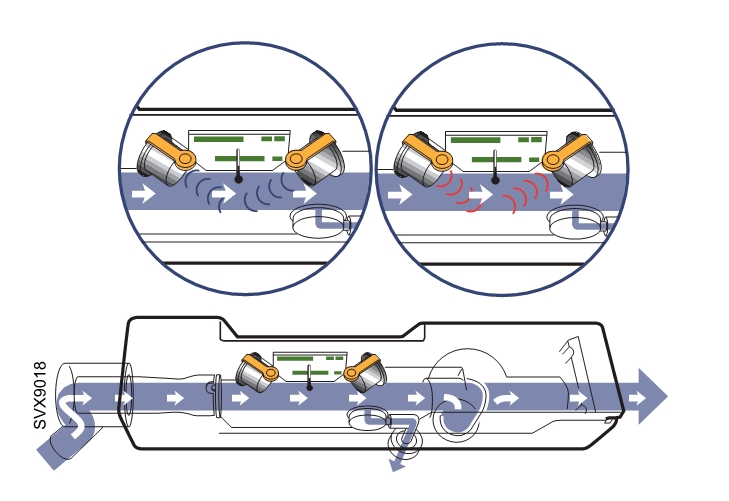
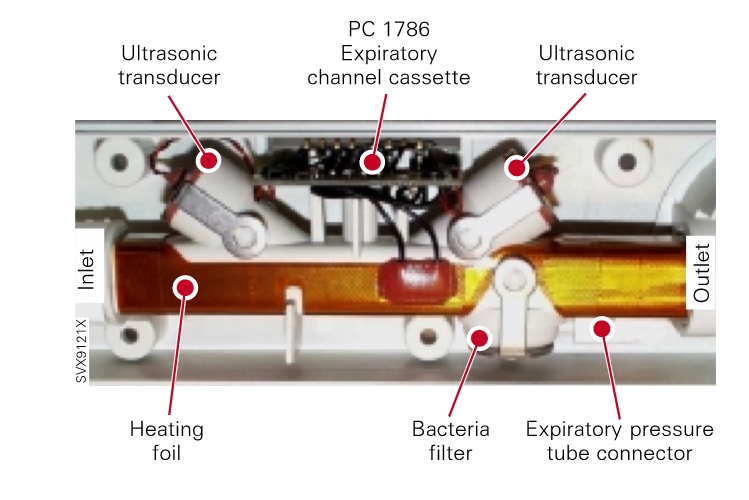
丂媧婥僈僗偺棳検寁應偼媧婥僈僗儌僕儏乕儖撪偵撪憻偟偨嵎埑宆偺僙儞僒乕偱寁應偡傞丅屇婥僈僗偺棳検寁應偼挻壒攇僩儔儞僕僢僩幃偱偁傞丅偙傟偼棳懱偺拞傪揱傢傞壒攇偺揱斃帪娫偑棳懱偺棳懍偵傛偭偰曄壔偡傞惈幙傪棙梡偟偨傕偺偱丄俀偮偺挻壒攇敪怣尮娫偺揱斃帪娫嵎偑棳検偵側傞丅儌僕儏乕儖撪偵偼埑僙儞僒乕偲屇婥曎偑撪憼偝傟偰偄傞丅
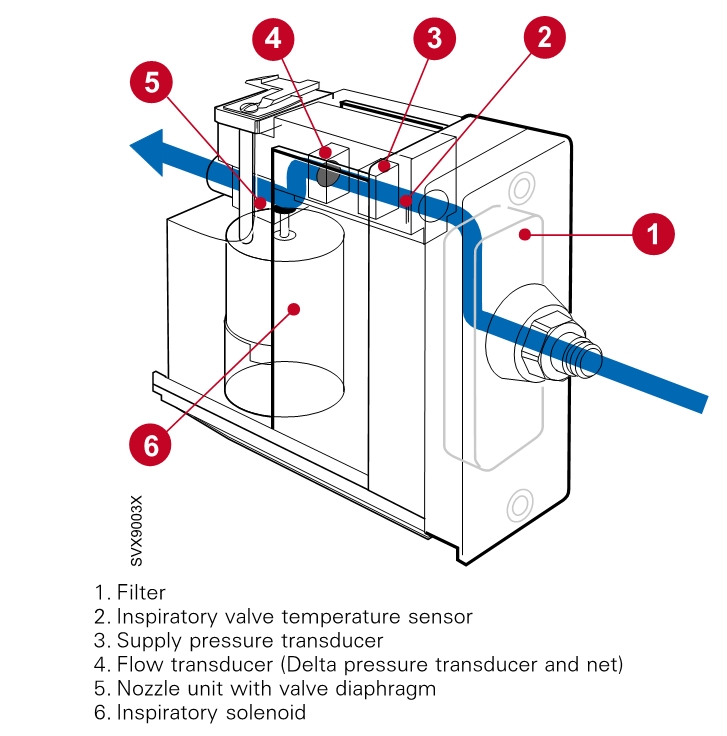
丂Servo300偲摨偠峔憿偱偁傞丅媧婥僶儖僽偼丄揹帴椡"electromagnetic motor"偵傛傝僺僗僩儞"piston"傪嬱摦偟丄枌幃僶儖僽"membrane valve"傪墴偟偰丄僈僗捠楬偺奐暵傪挷愡偡傞峔憿偵側偭偰偄傞丅媧婥僶儖僽偲嬱摦夞楬偼丄僼儘乕僐儞僩儘乕儖丒儐僯僢僩偲偟偰儌僕儏乕儖壔偝傟偰偄傞丅
丂扙拝幃偺屇婥曎儐僯僢僩偑嵦梡偝傟偰丄僒乕儃揱摑偺屇婥曎柵嬠拞偼壱摥偱偒側偄寚揰偑夝徚偝傟偨丅扙拝偼梕堈偵偱偒傞丅捠忢偼侾戜偺恖岺屇媧婍偵俀屄偺屇婥曎儐僯僢僩偑晅偄偰偔傞丅屇婥曎偲屇婥棳検寁應婡擻偲埑寁應婡擻偑堦懱壔偝傟偨儐僯僢僩宆偺峔憿偵撪憼偝傟偰偄傞丅Drager幮偺Evita偑弶婜偺崰偵嵦梡偟偰偄偨傕偺偲椶帡偱偁傞丅偙傟偼Drager幮偵帒杮嶲壛偟偰偄傞偺偲娭學偑偁傞偺偱偁傠偆偐丠峔憿偺徻嵶偼岞昞偟偰偄側偄丅
丂偙傟埲忋扨弮壔偱偒側偄掱僔儞僾儖偱偁傞丅僙儞僒乕偺墭愼梊杊梡偺僷乕僕棳偝偊徣偒丄僙儞僒乕枅偺僶僋僥儕傾僼傿儖僞偱墭愼偵懳墳偡傞丅偟偐偟偙傟傜偼姵幰枅偵岎姺傪梫偡傞晹昳偵側傞丅堦斒揑偵恖岺屇媧婍偵偼嶌摦拞偱偁偭偰傕埑傗棳検僙儞僒乕傪帺摦峑惓偟偰偄偔婡峔傪愝偗偰偄傞偑丄僒乕儃僔儕乕僘偵偼扨弮側僈僗夞楬備偊偵姵幰巊梡拞偵嶌摦偡傞帺摦峑惓婡峔傪帩偨側偄丅偟偨偑偭偰丄姵幰偵愙懕偡傞慜偵峴傢傟傞婲摦帪偺峑惓僾儘僙僗偼昁恵偱偁傝丄徣偄偰偼偄偗側偄丅
俆丏惂屼僜僼僩
奺婡擻偺愢柧
1)僩儕僈乕曽幃
丂屇婥僶儖僽捈慜偺埑曄壔偵傛傞埑僩儕僈乕曽幃傕偟偔偼僼儘乕僩儕僈乕曽幃傪慖戰偱偒傞丅怴惗帣偱偁偭偰傕倄僺乕僗偵僼儘乕僩儔儞僗僨儏乕僒傪昁梫偲偟側偄丅偙傟偼屇婥懁偺僼儘乕僩儔儞僗僨儏乕僒偺惛搙岦忋偺壎宐偱偁傞丅Ver3.0埲崀偼墳摎惈偲妋幚惈傪偝傜偵夵椙偡傞栚揑偱Y僺乕僗晹暘偱偺埑偲僼儘乕寁應偡傞Y僙儞僒乕僆僾僔儑儞傕壜擻偱偁傞丅偪側傒偵僶僀傾僗僼儘乕偼彫帣儌乕僪偱0.5LPM丄惉恖儌乕僪偱2LPM偱偁傝丄偦傟偵懳偟偰10%僗僥僢僾偱僼儘乕僩儕僈乕姶搙傪愝掕偱偒傞丅僼儘乕僩儕僈乕姶搙昞帵偼愨懳抣偱偼側偔儗儀儖1乣10偵側偭偰偄傞丅儗儀儖10偑嵟傕姶搙偑崅偄偑丄僆乕僩僩儕僈乕偡傞偺偱儗儀儖5偁偨傝偱巊梡偡傞偙偲偑悇彠偝傟偰偄傞丅儗儀儖傪忋偘傞偲僶乕僌儔僼偺昞帵偑愒偔側傞丅捠忢偼愒偔昞帵偝傟傞椞堟傪巊梡偟側偄丅儕乕僋曗惓婡擻偼側偄偺偱丄僇僼側偟僠儏乕僽傪巊梡偡傞嵺偵偼姶搙挷愡偑廳梫偱偁傞丅
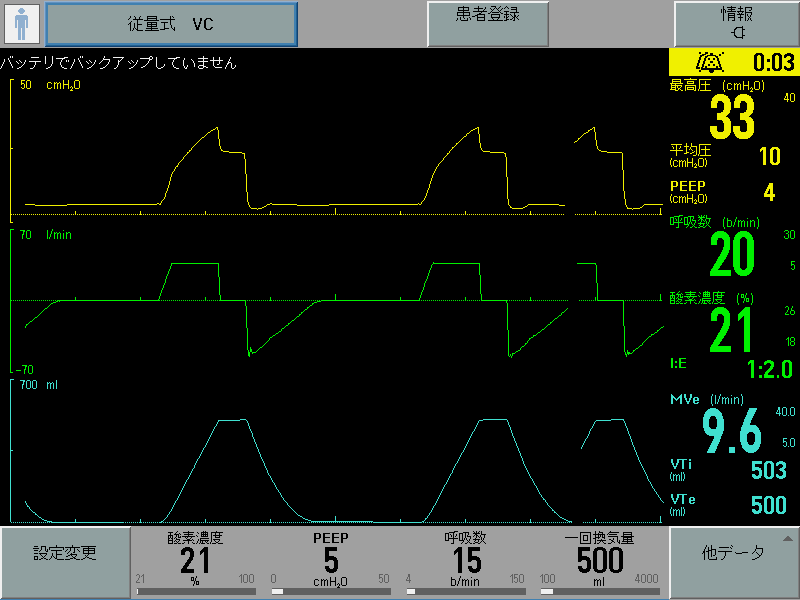
丂帪娫僒僀僋儖偲偄偆傛傝検僒僀僋儖偲偟偰偺惈奿偵椶帡偡傞曽幃偱偁傞丅捠忢偼媧婥僨傿儅儞僪偑嫮偄偲媧婥帪娫偑抁弅偡傞丅昦揑攛偺姵幰偵揔墳偡傞偙偲偼悇彠偝傟側偄丅偙偺儌乕僪偼"sCMV"偵憡摉偡傞偑丄帺敪屇媧傊偺摨挷惈偺夵慞偑夵椙揰偱偁傞丅僒乕儃偱偼丄偙傟傪Volume Control Ventilation(VCV)偲屇傫偱偄傞丅恾偺斣崋偵増偭偰愢柧偡傞丅嘆媧婥搘椡偑側偗傟偽愝掕偳偍傝偺TI丄TP丄TE偱屇媧僒僀僋儖偑峔惉偝傟傞(=Time cycle)丅 嘋媧婥僩儕僈乕偑偁傟偽偙傟偵摨婜偟偰嫮惂姺婥偑憲傜傟傞丅嘇媧婥帪娫(TI)偺娫偵丄嫮偄媧婥偑偁傝丄PEEP儗儀儖傛傝-2cmH俀O傑偱堿埑偵側傟偽丄僨傿儅儞僪僈僗偑嫙媼偝傟偰婥摴撪埑傪PEEP儗儀儖+2cmH俀O偵堐帩偡傞丅媧婥僨傿儅儞僪偑愝掕媧婥僈僗棳検傪挻偊偰偄傞尷傝丄媧婥検丄媧婥帪娫偲傕憹検偡傞丅傕偟搑拞偱媧婥僨傿儅儞僪棳検偑掅壓偟偰偒偰愝掕媧婥僈僗棳検偵摍偟偔側偭偨帪揰偱俀偮偺慖戰偑堊偝傟傞丅姺婥検偑払惉偝傟偰偄傞応崌偼偝傜偵媧婥僨傿儅儞僪偑宲懕偝傟傞丅媧婥偑廔椆偡傞偲媧婥億乕僘帪娫偑偙傟偵懕偔丅嘊傕偟媧婥僨傿儅儞僪棳検偑愝掕媧婥僈僗棳検偵摍偟偔側偭偨帪揰偱堦夞姺婥検偑払惉偱偒偰偄側偄帪偼丄堦夞姺婥検偑払惉偝傟傞傑偱愝掕偝傟偨棳検傪嫙媼偡傞(=Volume cycle)丅偙偺嵺偵偼媧婥帪娫偼抁弅偡傞丅偦偺屻偵媧婥億乕僘偑懕偔丅嘍媧婥搑拞偵忋尷埑"upper pressure limit"偵払偡傟偽媧婥偼嫮惂廔椆偡傞丅媧婥億乕僘偼擖傜側偄丅
丂屌掕帪娫曽幃偱偁傞丅帺敪姺婥憡偱偼僨儅儞僪僼儘乕傗PSV偑嫙媼偝傟傞丅僩儕僈乕僂傿儞僪乕偺挿偝偼丄CMV僒僀僋儖帪娫偺90%偱偁傞丅乮拲堄丗僒乕儃偱偼偙傟傪SIMV Breath cycle time偲屇傇偑丄懠儊乕僇乕偱SIMV cycle time偑堄枴偡傞奣擮偲堎側傞偺偱拲堄乯嫮惂姺婥偼Volume Control偱擖傞丅
丂偙偺儌乕僪偱偼丄嫮惂姺婥偼PCV偱擖傞丅嘆乣嘍偺愢柧偼SIMV(Volume Control)偲摨偠偱偁傞丅側偍丄姵幰偺埨慡偺偨傔偵媧婥埑偑Pressure Control Level above PEEP傪+20cmH俀O埲忋偵側傞偲媧婥偑嫮惂廔椆偡傞丅
5)PSV
丂媧婥廔椆擣幆忦審偼丄嘆媧婥棳検偑Cycle-off level乮僺乕僋抣偵懳偡傞亾抣乯埲壓偵側偭偨帪丄嘇婥摴撪埑偑婥摴撪埑忋尷偵払偟偨帪丄嘊PSV偺媧婥偑奐巒偟偰偐傜僺乕僋棳検偺25%偵側傞傑偱偺帪娫偺50%偑僺乕僋棳検偺抣偑25%埲壓偵側偭偰偐傜宱夁偟偨帪丄偱偁傞丅嘋偄偢傟偺応崌偱傕PSV偺嵟戝媧婥帪娫偼彫帣偱1.5昩丄惉恖偱2.5昩埲壓偵惂尷偝傟傞丅摿偵忦審嘊嘋偼儕乕僋側偳偱PSV偑廔椆偟側偄偺傪杊偖偨傔偺懳嶔偱偁傞丅
丂偙偺儌乕僪偼丄PCV偵憡摉偡傞丅Patient trigger傕偟偔偼Time trigger偱媧婥偑奐巒偝傟丄Time cycle偱媧婥偼廔椆偡傞丅恾偺傛偆偵愝掕偝傟偨丄TI丄TP丄TE偱僒僀僋儖偑峔惉偝傟傞丅媧婥帪娫偵偼Pressure Control above PEEP偱愝掕偝傟偨埑偑屇媧夞楬偵壛偊傜傟傞丅恾偵偮偄偰丄嘆媧婥棳検僷僞乕儞偼傆偮偆巄尭攇宍偵側傞丅媧婥偺廔傢傝偵偼丄嘇媧婥棳検偼丄0LPM偵嬤偔側傞偙偲傕偁傞偟丄嘊0LPM偺応崌傕偁傞丅嘋傕偟婥摴埑忋尷"upper pressure limit"偵偐偐傞偲懄嵗偵媧婥偼廔椆偡傞丅嘍姵幰偺媧婥搘椡偵摨婜偡傞偙偲傕偱偒傞丅 媧婥埑偑Pressure Control Level above PEEP傪+20cmH俀O埲忋挻偊偨応崌丄媧婥偼嫮惂夝曻偝傟傞丅
7)PRVC(Pressure Regulated Volume Control)(
恾丟PRVC偺愢柧)
丂偙傟偼PCV偺棙揰傪惗偐偟偨傑傑丄廬検幃偺姺婥偲摨摍偺岠壥傪払惉偡傞怴儌乕僪偱丄PCV埑傪帺摦挷惍偟偰姺婥検偺峆忢壔傪恾偭偰偄傞丅僺乕僋婥摴撪埑傪掅偔偱偒傞廬検幃姺婥儌乕僪偺曄庬偱偁傞丅偙傟偼Drager幮Evita偺Pressure Limitation Ventilation偲栚揑偼摨偠偔偡傞偑丄Evita4偱偼AutoFlow偵敪揥夵椙偟偰嵦梡偝傟偰偄傞丅偙偺儌乕僪偼丄PCV傛傝偝傜偵嫮惂揑偱丄傛傝姺婥擻椡偺朢偟偄姵幰岦偗偱偁傞丅媧婥僩儕僈乕偑偁傟偽丄偙傟偵摨婜偟偰丄側偗傟偽丄堦掕偺娫妘偱姺婥偑奐巒偝傟傞丅PCV埑偺寛掕偼師偺庤弴偱峴傢傟傞丅捠忢忬懺偱偼丄媧婥偺廔椆偛偲偵師偺墘嶼幃偱怴偟偄媧婥埑傪墘嶼偡傞丅
Pcalc=Pin use*TVp/TVm
丂Pcalc:寁嶼偝傟偨埑
丂Pin use:巊梡偟偨媧婥埑
丂Pnext:怴偟偔愝掕偝傟傞媧婥埑
丂TVp:愝掕偝傟偨堦夞姺婥検
丂TVm:幚應偝傟偨媧婥検
Pcalc抣偼9昩偺帪掕悢傪帩偮Low Pass Filter偵妡偗傜傟丄PCV埑惂屼梡偺怴偟偄婎弨埑(Pnext)偵側傞丅偮傑傝丄堦屇媧偛偲偵丄幚應僐儞僾儔僀傾儞僗偵婎偯偄偰丄昁梫偲偝傟傞PCV埑"Pressure Control Level"偑寛掕偝傟傞丅埑偺曄壔偼嵟戝3cmH俀O偵惂尷偝傟傞丅
丂嵟廔揑偵偼丄堦夞姺婥検偑堦掕抣偵廂懇偝傟傞丅嬶懱揑偵偼師偺僾儘僩僐乕儖偱惂屼偑峴傢傟傞丅恾偵増偭偰愢柧偡傞丅
嘆嵟弶偺姺婥偼10cmH俀O偺埑偱峴傢傟傞丅偙偺僥僗僩姺婥偱師偺PCV埑(Pcalc)偑墘嶼偝傟傞偑丄偙偺抣偼偦偺傑傑Pnext偲偟偰梡偄傜傟傞丅(僼傿儖僞張棟側偟)丂嘇堷偒懕偔3屇媧傕僼傿儖僞張棟側偟偱寛掕偝傟傞偑丄師偺幃偺傛偆偵丄埑偺曄壔検偺75%抣偑梡偄傜傟傞丅
丂Pnext=Pin use+0.75*(Pcalc-Pin use)
丂丂丂 =0.25*Pin use + 0.75*Pcalc
偙偙傑偱偑僥僗僩姺婥庤弴偵側傞丅
嘊5屇媧栚傛傝丄僼傿儖僞張棟偑峴傢傟丄捠忢偺庤弴偱丄昁梫偲偡傞姺婥埑(Pnext)傪嵞愝掕偡傞丅埑偺曄壔斖埻偼PEEP儗儀儖傛傝5cmH俀O below Upper Pressure Limit傑偱偱偁傞丅埨慡傪峫椂偟偰丄婥摴埑忋尷"Upper Pressure Limit"偼壜擻側尷傝掅偔愝掕偡傞丅嘋偵婯掕偝傟偰偄傞傛偆偵屇媧帪娫偼丄愝掕偝傟偨TI偲TE偵屌掕偝傟偰偄傞丅偙偺揰偑Volume Support偲偺堘偄偱偁傞丅嘍偼埑偑埨掕偟偰姺婥検傕愝掕抣偑堐帩偝傟偰偄傞偺傪帵偟偰偄傞丅嘐偱偼姺婥検偑愝掕抣傛傝幚應抣偺曽偑懡偔側傝姺婥埑傪尭傜偟偰偄傞夁掱傪帵偟偰偄傞丅傕偟姵幰夞楬偑媧堷憖嶌摍偱偼偢偝傟偨帪偼丄傕偆堦搙僥僗僩姺婥庤弴嘆偑巒傑傞丅
丂偙傟傕婎杮偼PSV偱偁傞偑丄暘帪姺婥検傪埨掕壔偝偣傞偨傔偵丄PRVC偲摨條偺庤弴偱怴偟偄PSV儗儀儖(=Volume Support儗儀儖)傪帺摦揑偵愝掕偡傞丅偨偩偟18昩偺帪掕悢傪帩偮僼傿儖僞偑梡偄傜傟傞丅 PRVC偲堎側傝丄屇媧悢偼姵幰偵埶懚偟偰偄傞偺偱幚應屇媧悢偵墳偠偰Pcalc偺墘嶼幃偑愗姺傢傞丅愝掕屇媧悢傛傝幚應屇媧偑懡偄応崌偼PRVC偲摨偠偱偁傞丅彮側偄応崌偼師偺幃偵側傞丅
Pcalc=Pin use*MVp/MVm
丂MVp:暘帪姺婥検偺愝掕抣
丂MVm:媧婥暘帪姺婥検偺幚應抣
嘆嵟弶偺僥僗僩姺婥偼10cmH俀O偺埑偱峴傢傟傞丅嘇昁梫曄壔検偺75%偺埑偱懕偔俁屇媧傪姺婥偡傞丅偙偙傑偱偼僼傿儖僞張棟傪偟側偄丅嘊偦偺屻偼捠忢偺庤弴偱愝掕偡傞丅埑偑曄壔偡傞斖埻偼PEEP儗儀儖傛傝Upper Pressure Limit - 5cmH俀O傑偱偱偁傞丅堦夞偺曄壔検偼3cmH俀O埲壓偱偁傞丅傑偨Pnext偼1.5*Pin use傪墇偊側偄丅嘋偱偼姺婥検偑愝掕抣傛傝幚應抣偺曽偑懡偔側偭偰偄傞偺偱丄師偺姺婥埑傪尭傜偟偰偄偔夁掱傪帵偟偰偄傞丅
嘍偙偺儌乕僪偼婎杮揑偵偼PSV偲摨偠曽幃側偺偱丄媧婥僩儕僈乕偑側偗傟偽姺婥偑巒傑傜側偄丅姵幰偼帺桼側媧婥帪娫偲屇媧悢偲屇婥帪娫偑嫋偝傟偰偄傞丅
嘐傕偟丄屇媧悢偑彮側偔側傝嘑柍屇媧傾儔乕儉偵偐偐傟偽丄嘒帺摦揑偵傾儔乕儉傪柭傜偟偰PRVC偵愗懼傢傝丄姵幰偺暘帪姺婥検傪妋曐偡傞丅傾儔乕儉傪庤摦偱儕僙僢僩偡傞偲嵞傃VS偵栠傞丅
丂姵幰偺媧婥検偑愝掕堦夞姺婥検偺175%偵側傟偽嫮惂揑偵媧婥憡偑廔椆偡傞丅姵幰夞楬偑媧堷憖嶌摍偱 偼偢偝傟偨帪偼丄傕偆堦搙僥僗僩姺婥傛傝奐巒偡傞丅
9)AutoMode
丂Servo-i偵偼PRVC, Volume Control, Pressure Control偺俁偮偺挷愡屇媧(嫮惂姺婥)儌乕僪偑梡堄偝傟偰偄傞偑丄丅偙傟傜偺俁儌乕僪傪慖戰偟偨嵺偵丄Automode僗僀僢僠傪ON偵偡傞偲俀夞楢懕偟偰僩儕僈乕偡傟偽control mode傛傝support mode偵愗傝懼傢傞丅support mode偵偍偄偰堦掕偺帪娫(Adult ; 12 sec., pediatric ; 8sec., neonate ; 5sec.)僩儕僈乕偑側偗傟偽帺摦揑偵control mode偵懼傢傞丅
PRVC/Support偱偼丄PRVC偺嵟廔偺姺婥埑偑偦偺傑傑Volume Support偺姺婥埑偺弶婜抣偵側傞丅Volume Control/Support偱偼丄嵟廔偺Volume Control偱偺EIP埑偑Volume Support偺姺婥埑偺弶婜抣偵側傞丅Pressure Control/Support偱偼丄偦傟偧傟偺愝掕埑偑姺婥埑偵側傞丅
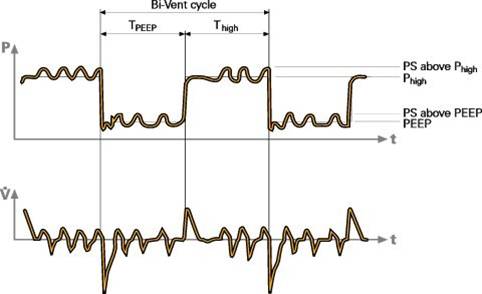
丂偙傟偼Drager幮偺BIPAP偲椶帡偺姺婥儌乕僪偱丄俀偮偺PEEP儗儀儖傪帺敪屇媧偵懳偟偰採嫙偡傞儌乕僪偱偁傞丅杮彂偵偍偄偰峀媊偺BIPAP偲婰嵹偟偰偄傞儌乕僪奣擮偵嬤偄丅崅埑憡偲掅埑憡偲偺堏峴偼壜擻側尷傝帺敪屇媧偵摨挷偡傞丅僩儕僈乕僂傿儞僪偵娭偟偰偼晄柧偱偁傞偑丄奺憡偺廔枛壗亾偐偑僩儕僈乕僂傿儞僪偵側偭偰偄傞傕傛偆偱偁傞丅Drager幮偺BIPAP偲堘偄丄崅埑憡偲掅埑憡偺偦傟偧傟偵擟堄偺埑偺PSV傪晅壛偡傞偙偲偑偱偒傞丅
丂儅僗僋壓偵峴偆埑姺婥儌乕僪偱偁傞丅NIV儌乕僪偵側傞偲夋柺昞帵偼墿怓偺榞偵側傞丅PSV偲PCV儌乕僪偺傒傪慖戰偱偒傞丅儕乕僋曗惓婡擻偼偁傞偑壜媦揑偵儕乕僋偑彮側偄傛偆偵嵟揔側儅僗僋傪慖戰偟偒偪傫偲僙僢僩偡傞丅NIV偱嫋梕偝傟傞嵟戝儕乕僋検偼Adult儌乕僪偱50LPM丄infant儌乕僪偱15LPM偱偁傞丅NIV偱偼僩儕僈乕姶搙偺愝掕偼側偄丅(1)婥摴撪埑偑1噋H2O掅壓偟偨偲偒丄(2)100ms偺娫偵6ml偺曄摦偑偁傞偲偒丄偵媧婥偑奐巒偡傞丅僒僀僋儖OFF偼(1)婥摴撪埑偑愝掕抣傛傝+1cmH2O忋偑偭偨帪丄(2)儕乕僋僼儘乕偑愝掕僒僀僋儖OFF抣傛傝掅壓偟偨帪丄偱偁傞丅
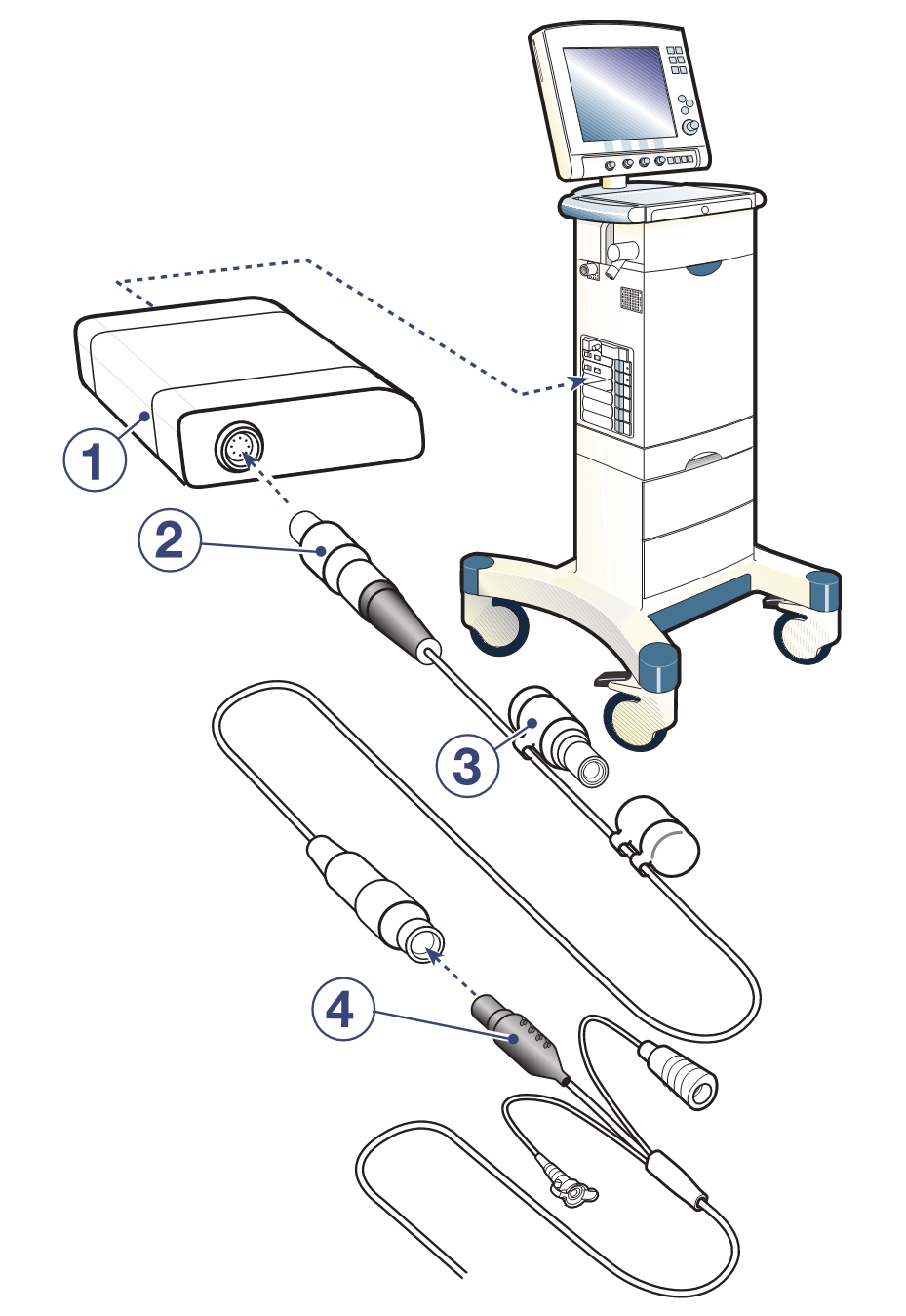
丂NAVA偼墶妘枌偺嬝揹埵偺嫮庛偵墳偠偰姺婥埑傪採嫙偡傞儌乕僪偱偁傞丅屇媧搘椡傪捈愙揑偵専弌偡傞偺偱僩儕僈乕偵懳偡傞抶傟偑棟榑揑偵嬌傔偰彮側偄丅NAVA傪棙梡偡傞偵偼嘆Edi儌僕儏乕儖傪Servo-i杮懱偵憰拝偟丄嘇愙懕働乕僽儖傪捠偠偰嘋姵幰偵憰拝偝傟偨Edi僇僥乕僥儖偐傜怣崋傪摼傞昁梫偑偁傞丅乮
恾丟NAVA偺峔惉昳乯乮
恾丟NAVA偺憰拝僀儊乕僕乯
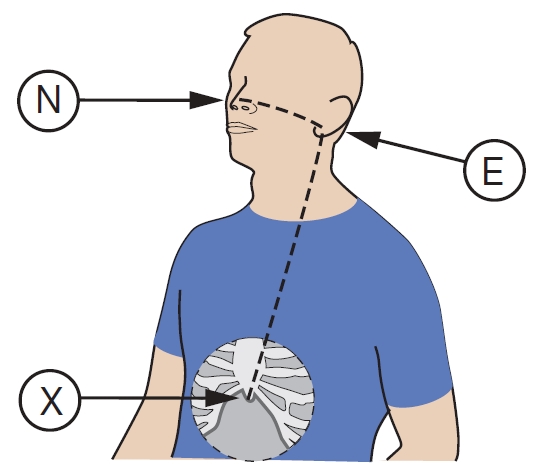
NAVA偵偍偄偰Edi僇僥乕僥儖偺埵抲寛傔偼廳梫偱偁傞丅偙偺偨傔偵丄Servo-i偱偼Edi僇僥乕僥儖埵抲寛傔偺偨傔偺夋柺偑梡堄偝傟偰偄傞乮
恾丟Edi僇僥乕僥儖埵抲乯丅Edi僇僥乕僥儖偵偼4屄偺揹嬌偑憰拝偝傟偰偄傞丅墶妘枌偺揹埵偺嵟嫮桿摫偼惵偔昞帵偝傟傞丅偙偺惵偄攇宍偑2-3斣栚偵昞帵偝傟傞傛偆偵僇僥乕僥儖偺埵抲傪挷愡偡傞丅堦斒揑尨懃偲偟偰乮N乯(E)(X)偺嫍棧寁應傪偟偰(NEX)丄偦偺忋偱僇僥乕僥儖憓擖挿傪壖寛掕偡傞丅(
恾丟NEX偺應掕乯偦偺屻偵Edi僇僥乕僥儖埵抲夋柺偱旝挷惍傪偡傞丅偪側傒偵僇僥乕僥儖憓擖慜偵丄僇僥乕僥儖傪悈偵幖弫偟偰弫妸惈傪暅妶偝偣傞丅(
恾丟Edi僇僥乕僥儖傊偺捠悈)
丂
丂丂丂丂丂宱旲偱偼 |
丂丂丂丂丂宱岥偱偼 |
Edi cath. size |
憓擖挿(cm) |
Edi cath. size |
丂憓擖挿(cm) |
16Fr
12Fr
8Fr125cm
8Fr100cm
6Fr50cm
6Fr49cm
丂 |
NEX*0.9+18
NEX*0.9+15
NEX*0.9+18
NEX*0.9+8
NEX*0.9+3.5
NEX*0.9+2.5
丂 |
16Fr
12Fr
8Fr125cm
8Fr100cm
6Fr50cm
6Fr49cm
丂 |
NEX*0.8+18
NEX*0.8+15
NEX*0.8+18
NEX*0.8+8
NEX*0.8+3.5
NEX*0.8+2.5
丂 |
丂
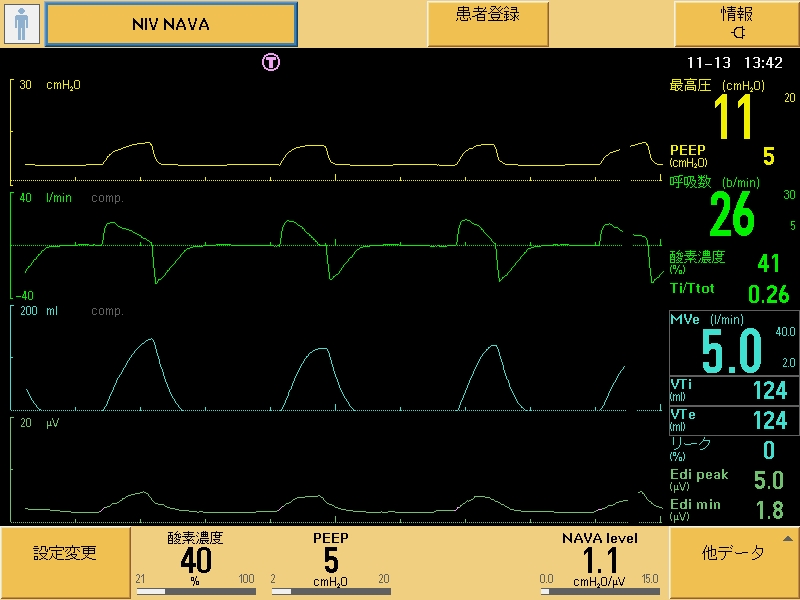
丂NAVA偵偍偄偰姺婥埑偼Edi揹埑×NAVA儗儀儖偵側傞丅椺偲偟偰5兪V×3cmH2O=15cmH2O乮abovePEEP乯偵側傞丅Edi偱僩儕僈乕怣崋傪摼傟側偄応崌偼-2cmH2O偺埑僩儕僈乕偱傕嶌摦偡傞丅傑偨婥摴撪埑偑栚昗埑偺+3cmH2O傪挻偡偲媧婥憡偼嫮惂廔椆偡傞丅傑偨Edi抣偑僺乕僋抣偺70亾埲壓偵側傞偲媧婥憡偼廔椆偡傞丅嵟挿媧婥帪娫偼彫帣偱1.5昩丄惉恖偱2.5昩偱偁傞丅
丂NAVA偱偼師偺崁栚傪愝掕偡傞丅NAVA儗儀儖丒PEEP丒巁慺擹搙丒Edi偱偺僩儕僈乕儗儀儖乮揹埑乯丒僯儏乕儅僥傿僢僋偱偺僩儕僈乕姶搙乮廬棃偺僩儕僈乕儗儀儖乯丒僯儏乕儅僥傿僢僋偱偺媧婥棳検偵傛傞僒僀僋儖僆僼丒PS儗儀儖丒僶僢僋傾僢僾姺婥拞偺PC儗儀儖丒僶僢僋傾僢僾屇媧夞悢丒僶僢僋傾僢僾姺婥偱偺媧婥帪娫/I:E斾
丂偙偺儌乕僪偼婎杮揑偵NAVA偲摨偠偱偁傞偑丄NIV偱偁傞偺偱丄僯儏乕儅僥傿僢僋偱偺僩儕僈乕愝掕偲僒僀僋儖僆僼婡擻偑柍岠壔偝傟偰偄傞丅
14)Insp.Hold丄Exp.Hold
丂偙傟傜偺儃僞儞傪巊偭偰丄End Inspiratory Pause pressure傗Auto-PEEP偺應掕偑偱偒傞丅
15)擖椡/弌椡
丂僆僾僔儑儞偺儊儌儕乕僇乕僪乮Ventilation Record Card偲徧偡傞乯傪憓擖偡傟偽夋柺偺僐僺乕傗丄姺婥忣曬傪婰壇偱偒傞丅儊儌儕乕僇乕僪傪夘偟偰僷僜僐儞偵忣曬傪僐僺乕偱偒傞丅偝傜偵RS232C抂巕偺僔儕傾儖億乕僩偐傜儕傾儖僞僀儉偱怣崋傪弌椡偱偒傞丅
16)僱僽儔僀僓乕
丂挻壒攇幃側偺偱嬱摦僈僗傪梫偟側偄丅偟偨偑偭偰嬱摦僈僗偵傛傞姺婥検偺曄壔傗巁慺擹搙偺曄壔偑婲偙傜側偄丅
17)柍屇媧僶僢僋傾僢僾婡擻
丂AutoMode傪棙梡偟偰柍屇媧僶僢僋傾僢僾傪峴偆曽朄偲Back-up Ventilation傪棙梡偡傞曽朄偑偁傞丅Back-up ventilation偱偼柍屇媧偱PSV仺PCV丄VS仺VC偵側傞丅I:E斾傗姺婥夞悢媧婥棫偪忋偑傝帪娫偼偦偺傑傑偱偁傞丅柍屇媧帪娫偼惉恖儌乕僪偱15-45昩偺斖埻偱丄彫帣儌乕僪偱偼5-15昩偺斖埻偱愝掕偱偒傞丅
18)PEEP compensator(PEEP曗惓)
丂屇婥僶儖僽偺僒乕儃婡峔偵傛傝丄屇婥僈僗棳検偵娭傢傜偢惓妋側PEEP/CPAP偑堐帩偝傟傞丅
19)CO2儌僯僞乕
丂僆僾僔儑儞偱Y僺乕僗愭抂偺CO2傪儌僯僞乕偱偒傞丅媧岝搙應掕曽幃偱偁傞丅
20)僶僢僥儕乕
丂12倴偺俶倝俵俫僶僢僥儕乕傪嵟戝俇儐僯僢僩傑偱憰拝偱偒傞丅侾儐僯僢僩偁偨傝偍傛偦30暘巊梡偱偒傞丅
21)僐儞僾儗僢僒
丂愱梡偺僐儞僾儗僢僒傪憰旛偱偒傞丅僐儞僾儗僢僒偲偟偰偼惷偐側曽偱偁傞偑僞乕價儞偺惷弆惈偵偼媦偽側偄丅
22)儔僀僘僞僀儉
1)婎杮
丂擺擖帪偵俀偮偺憖嶌懱宯乮媧婥帪娫愝掕曽幃偲I:E斾愝掕曽幃乯偐傜侾偮傪慖戰偱偒傞丅儊乕僇乕偺媄弍幰偑夝彍僉乕傪擖椡偟偰丄採嫙偡傞儌乕僪傗憖嶌懱宯傪愝掕偡傞傛偆偵側偭偰偄傞丅尰幚偲偟偰Adult丄Infant丄Universal偺偄偢傟偺婡庬傕慡偔摨偠僜僼僩僂僃傾乕傪帩偭偰偄傞偺偱愽嵼揑偵摨擻椡偱偁傞丅儔僀僙儞僗峸擖偵墳偠偰丄PRVC傗VS丄AutoMode丄Universal側偳偺婡擻偑夝彍偝傟偰丄偦偺儌僨儖偺惈擻偑寛掕偝傟傞丅
丂Servo-i偱偼傛偆傗偔暷崙巗応傗擔杮巗応偱偺嫮偄梫朷偵傛傝乮暷崙偲擔杮偱偺斕攧戜悢偵傎偲傫偳嵎偑側偔丄擔杮偱偺斕攧戜悢偑懡偄帪婜傕偁傞乯丄堦斒揑側恖岺屇媧婍偱梡偄傜傟偰偄傞媧婥帪娫愝掕曽幃丄偮傑傝堦夞姺婥検丄媧婥帪娫丄姺婥夞悢偐傜愝掕偟偰偄偔曽幃傪慖戰偱偒傞丅偙偺応崌I:E斾偼1:2偲偟偰撪晹張棟偝傟SIMV偺僩儕僈乕僂傿儞僪乕帪娫偑寛掕偝傟傞丅
丂堦曽丄偙傟傑偱偺僒乕儃偵嵦梡偝傟偰偄偨I:E 斾愝掕曽幃傕慖戰偱偒傞丅偙傟偼僒乕儃撈摿偺暘帪姺婥検丄屇媧悢丄亾媧婥帪娫丄亾媧婥億乕僘帪娫偐傜愝掕偟偰偄偔曽幃偱丄廬棃偺僒乕儃偺憖嶌懱宯傪悽廝偱偒傞丅偟偐偟偙偺曽幃傪梡偄傞昁慠惈偼媈栤偱偁傞丅
2)憖嶌
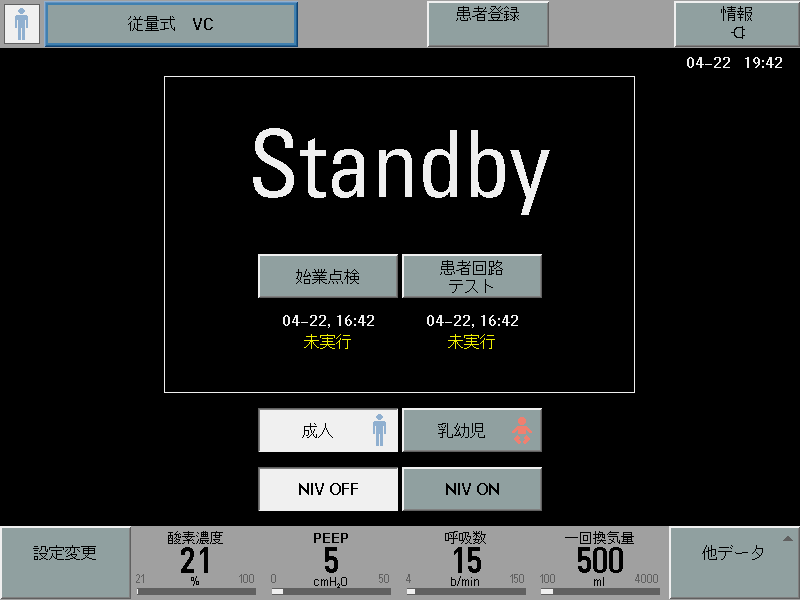
丂婲摦帪偵僗僞儞僶僀夋柺偑昞帵偝傟傞乮
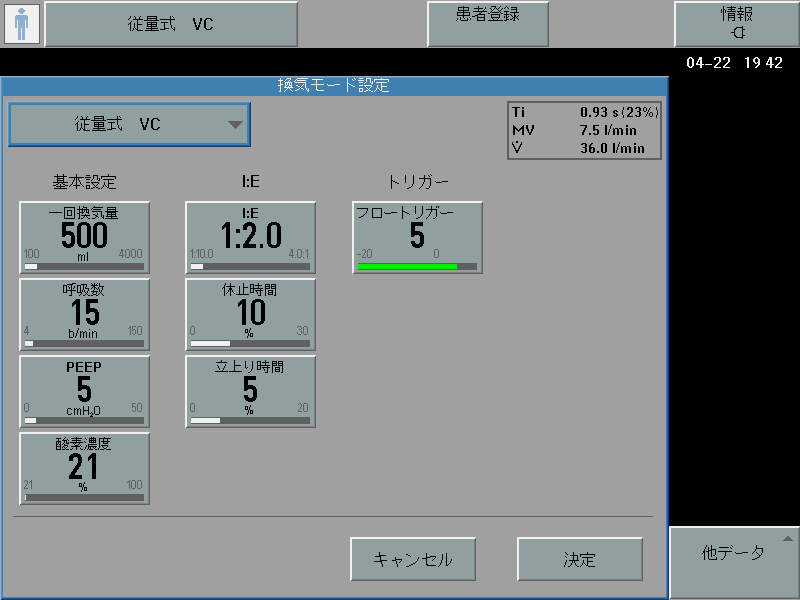
恾丟巒摦帪偺夋柺乯丅捠忢偼巒嬈揰専儊僯儏乕傪慖戰偟偰巒嬈揰専傪峴偆丅嬞媫帪偵偼僗僉僢僾偟偰僗僞乕僩偡傞偙偲傕壜擻偱偁傞丅僞僢僠僷僱儖傪梡偄偰愝掕偡傞乮
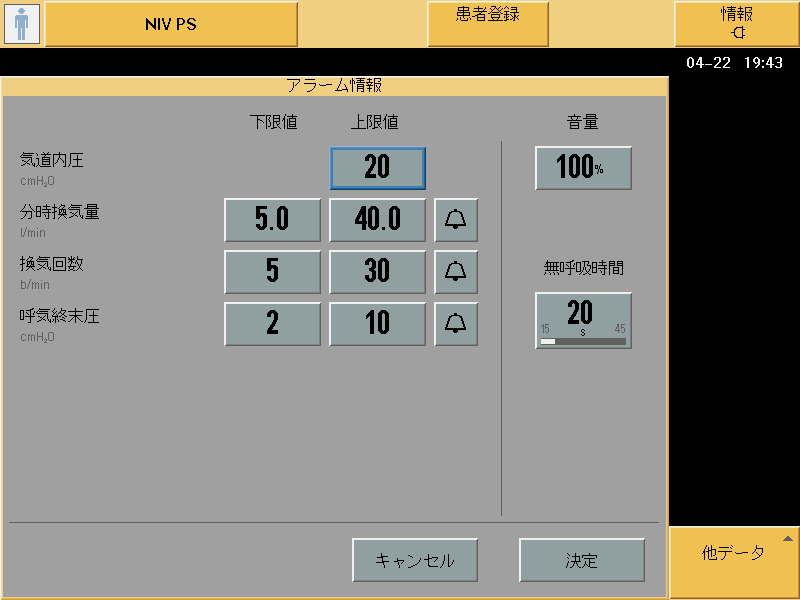
恾丟愝掕儊僯儏乕偑昞帵偝傟偨夋柺丟偙偺恾偱偼NIV儌乕僪乯丅儌乕僪丄堦夞姺婥検丄姺婥夞悢丄傾儔乕儉愝掕側偳偼僞僢僠僷僱儖偱慖戰偟偰丄儊僯儏乕傪昞帵偝偣偰僲僽偱悢抣傪慖戰偟丄僲僽傪墴偟偰妋掕偡傞丅PEEP傗巁慺擹搙側偳丄昿夞偵傾僋僙僗偡傞崁栚偼僷僜僐儞偺僼傽儞僋僔儑儞僉乕偺傛偆偵丄崁栚偵懳墳偟偨偮傑傒偑塼徎夋柺偺壓晹偵梡堄偝傟偰偄傞偺偱慺憗偔愝掕曄峏偑偱偒傞乮晄梡堄偵曄峏偝傟側偄傛偆偵摟柧僇僶乕偱曐岇偝傟偰偄傞乯丅
嘆屇婥暘帪姺婥検丟忋尷丄壓尷丄側傜傃枹愝掕傾儔乕儉丅
嘇婥摴撪埑忋尷丟寈曬偲摨帪偵媧婥偼嫮惂廔椆偡傞丅
嘊柍屇媧丟15昩娫僩儕僈乕偑擣幆偝傟側偄帪丅
嘋巁慺擹搙丟忋尷丄壓尷丅
嘍偦偺懠丟揹尮丄僈僗嫙媼偵堎忢偺偁傞応崌丅
丂奺庬僌儔僼傿僢僋昞帵乮僼儘乕丄儃儕儏乕儉丄埑丄僼儘乕儃儕儏乕儉僇乕僽側偳乯丄奺庬偺儌僯僞乕悢抣側偳偺昞帵偑壜擻偱偁傞丅
俋丏姵幰夞楬峔惉丄壛幖婍
丂F&P側偳偑慖戰偱偒傞丅
侾侽丏擔忢偺儊儞僥僫儞僗
丂屇媧夞楬偲屇婥宯偺晹昳偺愻忩丄柵嬠丄姡憞偑昁梫偱偁傞丅屇婥儐僯僢僩偼85亷埲忋偺壏悈偱愻忩偟偨屻丄傾儖僐乕儖側偳偱徚撆偟丄偦偺屻丄惛惢悈偱備偡偓丄僆乕僩僋儗乕晹偱柵嬠姡憞偝偣傞丅屇婥儐僯僢僩傪暋悢戜梡堄偟偰偍偗偽丄屇婥儐僯僢僩傪弴師岎姺偟偰偄偔偙偲偱婡婍傪楢懕巊梡偡傞偙偲偑壜擻偱偁傞丅屇婥宯偺柵嬠傪旔偗傞偨傔偵僨傿僗億偺僶僋僥儕傾僼傿儖僞傪屇婥曎捈慜偵愝抲偡傞庤傕偁傞丅
侾侾丏掕婜揰専
1)媧婥宯
丂擭偵侾搙傕偟偔偼5,000帪娫枅偵媧婥宯偺晹昳傕愻忩丄柵嬠偡傞丅嬶懱揑偵偼僈僗儌僕儏乕儖梡偺僼傿儖僞丄媧婥埑僩儔儞僗僨儏乕僒梡偺僶僋僥儕傾僼傿儖僞丄O2僙儖梡偺僶僋僥儕傾僼傿儖僞丄僈僗儌僕儏乕儖梡偺僲僘儖儐僯僢僩丄偱偁傞丅
2)巁慺僙儞僒乕
丂巁慺擹搙應掕梡偺擱椏揹抮偼徚栒昳側偺偱掕婜揑偵岎姺偑昁梫偱偁傞丅岎姺屻偼僉儍儕僽儗乕僔儑儞偑昁梫偱偁傞丅挿婜娫巊梡偱偒傞挻壒攇宆僙儞僒乕傕僆僾僔儑儞偱梡堄偝傟偰偄傞丅
3)偦偺懠
丂擭偵侾搙傕偟偔偼5,000帪娫枅偵僶僢僥儕乕儌僕儏乕儖偺揰専丄僈僗嫙媼埑僩儔儞僗僨儏乕僒傪揰専偡傞乮徻嵶偼儅僯儏傾儖傪嶲徠乯丅
4)屇婥僇僙僢僩儊儞僽儔儞
丂屇婥曎偺儊儞僽儔儞偼栚埨偲偟偰1,000枩夞偺嶌摦乮價乕僩乯偑壜擻偱偁傞丅屄乆偺僇僙僢僩偵懳偟偰巊梡忬嫷傪昞帵偡傞婡擻偑梡堄偝傟偰偄傞乮傾僋僙僗曽朄偺徻嵶偼儅僯儏傾儖傪嶲徠乯丅
侾俀丏寚揰
1)I:E 斾愝掕曽幃偲屇偽傟傞僒乕儃撈摿偺憖嶌懱宯傪傕宲彸偟偰偄傞偑丄偙偺揰偼堦尒僒乕儃儐乕僓乕偵恊愗偵尒偊傞偑丄尦棃偙偆偟偨憖嶌懱宯偼寚揰偱偁偭偨偺偱尰幚揑偵偼柍堄枴偱偁傞丅
2)偡傋偰偺惗嶻儌僨儖偼僴乕僪僂僃傾乕丄僜僼僩僂僃傾乕偲傕偵摨摍偱偁傞偺偵丄儐乕僓乕偑巟暐偭偨嬥妟偱僜僼僩僂僃傾乕揑偵婡擻偑惂尷偝傟傞偺偼晄桖夣偱偁傞丅側傫偲儀乕僔僢僋儌僨儖偵偼SIMV偲PSV丄VC偟偐搵嵹偝傟偰偄側偄丅PRVC傗VC丄AutoMode丄Bi-Vent偼尵偆偵媦偽偢丄PCV偱偡傜僆僾僔儑儞埖偄偱偁傞丅寛偟偰埨偔側偄Servo-i偵PCV偡傜昗弨搵嵹偑側偄偺偼棟夝偵嬯偟傓丅壗傕弉椂偣偢乮恖擟偣偵偟偰乯峸擖偟偨Servo-i偑丄抣愗傝偵抣愗偭偰埨偔攦偭偨Servo-s偲惈擻偑摨偠偩偭偨偲偄偆徫偆偵徫偊側偄帠懺偑偍偙偭偰偄傞丅幵偵椺偊傟偽丄崅壙側儀儞僣偵僷儚乕僂傿儞僪僂傗儕傾儚僀僷乕丄僄傾僐儞偑偮偄偰偄側偄傛偆側傕偺偱偁傞丅堦斒揑側擔杮恖儐乕僓乕偺怱忣偲偟偰惢憿僐僗僩偵尒崌偭偨壙奿偵偼擺摼偄偔偑丄僜僼僩揑側帠暱偡傋偰偵崅妟側壙奿愝掕傪偟偰偄傞偙偲偵晄夣姶傪姶偠傞丅偙偺楬慄偱峴偔側傜丄婡擻偑崅傑傟偽偦傟偵尒崌偭偰壙奿偑崅摣偡傞偙偲偵側傞丅僷僜僐儞傗壠掚揹壔惢昳偺姶妎偱尵偊偽丄夵椙傗媄弍偺恑曕偼摉慠偱偁傝丄偦傟偵懳偟偰崅妟偺僆僾僔儑儞旓梡傪梫媮偡傞偺偼恑曕傪柍帇偟偨栶恖揑敪憐偱偁傞丅偙偆偟偨壙奿愝掕偑梕擣偝傟傞側傜尰嵼偺僷僜僐儞偼侾戜侾侽侽壄傪挻偊傞壙奿愝掕偵側傞偼偢丅偪側傒偵儔僀僶儖偺暷崙惢偺VELA偼昗弨偱奺庬儌乕僪偰傫偙惙傝偱楑壙婡偺壙奿懷偵側偭偰偄傞偺偱丄僜僼僩帺懱偵僐僗僩偑偦傟掱偐偐偭偰偄傞偲偼巚偊側偄丅僯儏乕億乕僩幮偺e360偼傎傏敿妟偱僜僼僩僂僃傾乕枮嵹偱偁傞丅擔杮崙撪偵偍偄偰偼丄偝偡偑偺僒乕儃傕塩嬈忋丄幚嵺偺斕攧尰応偱偼儗僗巇條偱尒愊傕傝傪弌偟丄擺擖帪偵僆僾僔儑儞婡擻傪僒乕價僗偟偰偄傞柾條偱偁傞丅偟偐偟偙偆偟偨斕攧宍懺偼堎忢偱偁傞丅
3)攛儊僇僯僋僗傪昞帵偡傞偺偵傕丄崅妟側僆僾僔儑儞偑昁梫側偺偼棟夝偱偒側偄丅
4)摿庩側忬嫷偱偼偁傞偑丄PRVC傗Bi-Vent儌乕僪偱傕媧婥憡搑拞偵媫寖側屇婥偑偁傞偲婥摴撪埑偑傾儔乕儉儗儀儖傑偱忋徃偟偰偟傑偆丅偮傑傝屇婥曎偱偺埑儕儕乕僼偑抶偄丅僇僞儘僌忋偩偗偱尵偊偽丄媧婥懁偺埑惂屼宯偺墳摎惈偼Evita偵斾傋傞偲埑搢揑偵椙偄偑丄嬌抂側忬嫷壓偱偼丄僌儔僼傿僢僋夋柺忋僆乕僶乕僔儏乕僩偵傛傞埑僗僷僀僋傗埑儕儕乕僼偑抶偄偨傔偺埑僗僷僀僋側偳偺尰徾偑娤嶡偟偆傞丅偙偺尨場偼屇婥曎偺埑惂屼僜僼僩偺栤戣偱偁傠偆丅Bi-Vent偱偁偭偰傕婡夿撪晹偱偼媧婥憡偲屇婥憡偺嬫暿偑偁傝媧婥憡偱偼屇婥曎傪埨慡埑偱暵偠偰偄傞偨傔丄媫寖側屇婥偺奐巒偑偁傞偲丄屇婥曎偺夝曻偑抶傟偰媫寖側埑僗僷僀僋傪惗偠傞丅偪側傒偵Evita偱偼CPAP埑偑宱帪揑偵曄壔偡傞宍偱媧婥曎偲屇婥曎偑惂屼偝傟偰偄傞偺偱丄愝掕埑埲忋偺僈僗偼屇婥曎傛傝儕儕乕僼偝傟傞丅偦偺偨傔埑攇宍偵僗僷僀僋偼傎偲傫偳擣傔偢偁偭偨偲偟偰傕1cmH2O掱搙偱偁傞丅偦偺偐傢傝丄儕儕乕僼帪偵偼屇婥曎傛傝僊儏乕偭偲晄夣壒傪惗偠傞偙偲傕偁傞丅
5)媧婥僈僗偑棳傟傞壒丄屇婥僈僗偑攔弌偝傟傞壒偼丄愄偺僒乕儃傕嵟怴偺僒乕儃傕峔憿偑堘偆偺偵摨偠壒偑偡傞偺偼丄帺摦幵偺攔婥壒偑儊乕僇乕枅偵撈摿偺壒偑偁傞偺偵帡偰偄偰嫽枴怺偄丅偨偩偟丄屄恖揑側岲傒偱尵偊偽丄僒乕儃偺壒偼僔儏僲乕働儖側偳嵶偄娗傪捠偠偰屇媧傪偟偰偄傞傛偆側懅嬯偟偝傪姶偠偝偣傞壒側偺偱報徾偼椙偔側偄丅
6)偍偦傜偔僴乕僪僂僃傾偺惈擻偼悽奅嵟崅偱偁傠偆丅偟偐偟側偑傜丄惂屼僜僼僩偑偙傟傪惗偐偟愗傟偰偄側偄丅僴乕僪僂僃傾乕惈擻偺楎傞Evita 偵懳偟偰丄憤崌揑側昡壙偵偍偄偰寛偟偰彑偭偰偄傞偲偼尵偊側偄丅憖嶌懱宯偺弉惉搙傗丄屇婥曎偺惂屼僜僼僩傪娷傔偨埑惂屼媄弍丄僈僗棳検惂屼媄弍丄偵偍偄偰僲僂僴僂偵楌慠偲偟偨嵎偑偁傞丅怴惗帣儌乕僪偱傕僩儕僈乕偵儕乕僋曗惓婡擻偑側偄偺偱丄偣偭偐偔偺悽奅嵟崅僋儔僗偺僩儕僈乕姶搙傪惗偐偟偰偄側偄丅
7)巒摦奐巒帪偵僥僗僩僔乕働儞僗傪梫媮偝傟傞偺偼柺搢偱偁傞丅偙傟偼偱偒傞偩偗僯儏乕儅僥傿僢僋夞楬傪扨弮偵偡傞偲偄偆愝寁巚憐偵傛傞巇條偺栤戣偱偼偁傞丅偟偐偟丄偳傟偩偗儐乕僓乕偺棟夝傪摼傜傟傞偐媈栤偱偁傞丅
8)昁梫側僆僾僔儑儞傪憰旛偡傞偲偲偰傕妱崅偵側傞丅
9)彫帣儌乕僪偵偍偄偰丄埑偺棫偪忋偑傝偑埆偄丅PCV側偺偵Pressure Limit偺傛偆側慟憹攇偵側傞偙偲偑偁傞丅
10)僇僞儘僌忋偺僗儁僢僋偱偼恖岺屇媧婍偺拞偱悽奅嵟崅姶搙偱偁傞偑丄尰幚揑偵偼丄彫帣偱偼僩儕僈乕偟偰偄側偄偙偲偑懡乆偁傞丅偙傟偑NAVA傪奐敪偟偨棟桼丠丠
11)傾僔僗僩姺婥屻偵楢懕偟偰嵞僩儕僈乕偡傞尰徾偑帪乆尒傜傟傞丅僼儘乕僩儕僈乕偵偍偄偰昿搙偑崅偄丅夝寛嶔偲偟偰埑僩儕僈乕偱-2cm偔傜偄偺掅姶搙偵偡傞偲夝徚偱偒傞偑丄偦偆偡傞偲僩儕僈乕傑偱偺巇帠検偑懡偄丅僼傿儖僞儕儞僌傾儖僑儕僘儉偑椙偔側偄偺偐丠丠
11)僄價僞僔儕乕僘偲斾妑偡傞偲埑惂屼偑娒偄丅僆乕僶乕僔儏乕僩傗傾儞僟乕僔儏乕僩丄偦傟偵屇婥曎偺夝曻抶傟側偳偱丄埑攇宍偼傢傝偲曄摦偡傞丅偗偭偟偰偒傟偄側嬮宍攇偵側傜側偄丅棫偪忋偘懍搙傪偄偠傞偲懡彮夵慞偡傞偑丄挷愡晄梫偺僄價僞偵彑傞偙偲偼側偄丅
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}