PAV(Proportional Assist Ventilation),PAV+,PPS
機械的強制換気(CMV)で肺を換気する場合、吸気過程のある時点で肺を膨らませるのに必要な圧PVENTは以下の式で表される。
PVENT=Ers*V+Rrs*V'
ただし、Ers:肺の弾性
V :肺の容量
Rrs:呼吸器系の抵抗
V' :気道ガス流量
仮に肺を、VとV'の実測値に応じて、PVENTの数%の圧で加圧して換気補助をすれば吸気仕事量はそれだけ減じられる。PVENTに対する実際の換気圧の比を(相対的)ゲインを呼び、ゲインに応じてPAVの換気補助の割合が変化する。Ers*Vに対するゲインをボリュームゲインと呼び、Rrs*V'に対するゲインをフローゲインと呼ぶ。もしゲインが1.0であれば、単純なモデル肺ではどの状態(相)でも、そのときのボリュームで膨らんだままの状態で安定する。この状態から患者が吸気・呼気をしても患者の仕事量はゼロになるように補助される。仮にゲインが0.5であれば吸気・呼気に必要な仕事の半分だけ機械が負担することになる。このように必要な仕事に対して一定の割合で仕事を補助するので「プロポーショナル」と命名されている。この換気様式は理論的には、自発呼吸と強制換気の任意の程度を選択できるモードである。しかし後述のように、設定できるゲインに限界があるので、PSVと同じように自発呼吸を温存した状態で呼吸仕事量を軽減する自発呼吸モードとして機能する。
2.PAVの構成要素
1)ゲイン
ゲインは必ず1.0以下に設定される。1.0以上の設定ではシステムが暴走して(RunAwayと呼ばれる)、患者の肺は最大吸気量まで膨張する。実際の肺は必ずしも理論通りのErsとRrsどおりにならないので、安全を見込んで、経験的な数字として0.8以下の値が用いられる。このように設定できるゲインが制限されているのでPAVの可能性もその分だけ減じられる。
2)ErsとRrsの計測
対象が意志を持って反応する人間だけに、これらの値の正確な計測は常に困難が伴う。また、実際のErsとRrsは単純なモデルで表現できるほど簡単でない。その上これらは経時的に変化するので一定間隔で更新する必要がある。
a)Ersの計測
現在、Ersの測定方法は2つ提唱されている。1つは吸気ホールド法で、CMVもしくはPAVでの換気で、吸気終末にポーズを設けてErsを測定する。Ers=(plateau pressure.-PEEP)/Vtになる。もう1つはRunAway法と呼ばれるもので、ゲイン(絶対値)を低い値より上げていくと、患者の固有のErsを超えた時点でシステムがRunAwayを起こし、吸気時間や一回換気量が著しく増大する。この移行点の値がErsである。
b)Rrsの測定
Rrsは(peak pressure-plateau pressure)/Vtで決定できる。ただし、気管チューブの抵抗をあらかじめ除外しておく必要がある。気管チューブの抵抗は、チューブサイズによって一定であるので、あらかじめ計測しておいた既定値を用いることができる。RrsもRunAway法でも決定することが可能である。
3)バックアップ機構
ゲインを高くするほど、システム暴走(RunAway)は不可避の問題であり、安全策は必須である。またPAVは自発呼吸の存在が前提なので、無呼吸に対するバックアップ機構も不可欠である。現時点では、安全策として吸気時間制限、吸気ボリューム制限、吸気圧制限、そして無呼吸や低分時換気量に対して、SIMVやPCVそしてA/C(Volume)によるバックアップ機構が提唱されている。
4)制御システムの性能
システムの反応時間が短い程、また計測できるVの精度が高い程、追従できる最大吸気ガス流量が大きいほど、システムの安定性が良くなる。経験的に、成人では、100ms以下の反応時間、12 LPM以下のフロートリガー感度、180 LPM以上の吸気ガス供給能力が望ましいと言われている。
3.制御方式
1)制御機構
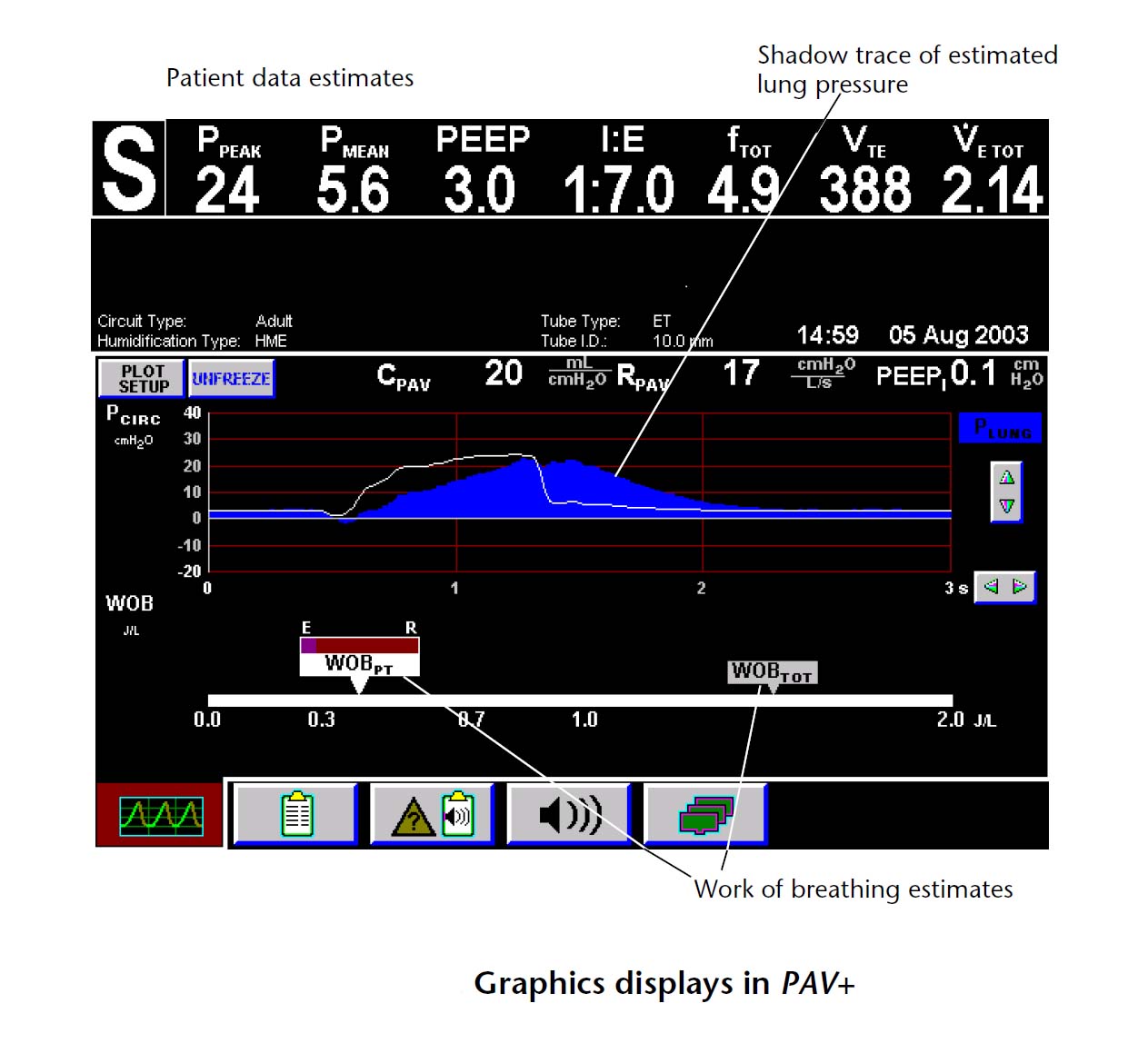
Respironics社のBiPAP VisionやDrager社のEvita4、Bennett社の840などでオプション搭載できる。いずれの機種もMPU制御方式である。Bennett社のPAV+モードは自動的にWOB(呼吸仕事量)を定時的に計測する機構が内蔵されており、WOBを指標にPAVのアシスト程度を設定するようにデザインされている。したがってPAVの設定が簡便化されている点で従来のPAVを超えるモードの意味でPAV+というモード名が命名されている。(図;PAV+の設定画面)。現状では一番設定方法が理解しやすいと言われている。ただ、吸気ホールド法でランダムに吸気ポーズが入るが、数回の換気に一回入るので患者にとっては不快で煩わしい。
2)制御理論
PAVは、患者の行う呼吸仕事に対して、その何割かを補助する呼吸モードである。つまりPAVが動く人工呼吸器は、呼吸中枢が出力する信号(呼吸筋を動かそうとする信号)を呼吸筋(呼吸器)の動きより読みとり、これを増幅して呼吸筋の動きを補助するように呼吸器に作動し、呼吸筋力増幅器として作動する。PAV人工呼吸器にとって、患者の呼吸器は負荷でもあり入力信号でもある。自らの出力がそのまま入力になる不安定なループができている。増幅器のゲインと特性、負荷の特性によって固有共振周波数が決定されるので、増幅度が一定値を超えると発振器になる。この状態をRunAwayと規定できる。
換気量や換気回数を決定するのは呼吸中枢で、呼吸中枢は換気の結果に対して、患者自身の生体センサーよりフィードバック信号を受けて誤差を修正している。したがってPAVはフィードフォワード制御の1種と表現できる。フィードフォワード制御が安定して作動するには以下の条件が必要である。
a)フィードバック制御機構が正しく機能している。
患者の呼吸中枢が正しく機能していて、低換気や過換気、動脈血中の酸素や二酸化炭素、pHに対して正しく反応できる。呼吸器の特性が人工呼吸器システムの想定した範囲内にある。
b)呼吸中枢の信号を正しく読みとれていること
呼吸中枢の信号は呼吸器の動きとして人工呼吸器は捉えている。呼吸中枢の信号を具体的に把握する手法として、患者の肺をモデル肺と見なし、肺の弾性(Ers)と呼吸器系の抵抗(Rrs)を用いた数式により呼吸仕事を計算する。そしてErsとRrsは定数として扱う。しかし、実際の患者では、同一の患者であってもErsの値は吸気量によって変化する。Rrsもけっして一定でない。そしてこれらは経時的に変化する。このように患者の呼吸仕事を正確に捉えるのは難しく、これがPAV理論が抱える原理上の弱点である。
c)フィードバックゲインとフィードフォワードのゲインのバランスが適切な範囲にある
患者の呼吸中枢と呼吸器の間に存在するフィードバックサーボループについて、そのシステム全体のゲインやフィードバックゲインを数量化するのは極めて難しいが、臨床上PAVが安定して作動する最大のゲインが80%程度であることより、生体のもつフィードバックゲインは、80%のゲイン値より少し高い程度であると推定できる。PAVのゲインを高くしすぎた状態がRunAwayである。
d)フィードフォワード制御の反応時間がフィードバック制御の反応時間より短い
もし、フィードフォワードの反応が患者の呼吸システム全体の反応より著しく遅く、フィードフォワードが遅延すればシステムは不安定になり、場合によっては発振を起こす。これもRunAwayの1形態であると推定できるが、PAVにおけるRunAwayにはこの状態は定義されていない。しかし、多くの臨床医は、人工呼吸器の反応時間や最大吸気ガス供給能力が、ほとんどの患者に追従できていないのを、しばしば観察している。PAVが提唱されて久しく経っているのになかなか市販されなかったのは、これらの点を克服するのが困難であったことも原因である。
4.利点と欠点
1)パラメーターの設定
PSVでは、吸気終了条件の最適値をどう決定するか、PSVレベルの最適値をどう決定するかが議論になっている。同様に、CMVでも吸気時間、吸気ボリューム、換気回数、を決定する方法に関して、誰もが納得できるプロトコールはない(しかし、グラフィックディスプレーで患者の換気パターンをモニターさえすれば、多くの臨床医は経験的にこれらの値を決定することはそれ程難しい問題でないと感じている)。一方、PAVには理論的にこうした問題はない。臨床上、ゲインの値に関わらず、一回換気量、吸気時間、換気回数はほぼ一定の値になるのが観察される。これらの値は患者が望む、患者固有の値と説明され、これもPAVの利点と言われている。結果的には、PAVで設定を要する項目は、ゲインだけであり設定が単純である。しかし、最適なゲインはどの値かに関しては、必ずしも明快とは言えない。さらにボリュームゲインとフローゲインは同一が望ましいのか、異なったゲインを設定するのかについて、明快な知見はない。
2)トリガー機構
トリガー機構の誤動作に関してもPAVの方が有利とされている。PSVやsCMVでは、感度を高くしすぎると誤作動をおこし吸気相が開始してしまう弊害がある。これを避けるために必然的に感度を低く抑える必要性がある(しかしこれも最近ではフィルタリング・アルゴリズムの工夫で解決している)。PAVには原理的にトリガー機構が必要でなく、単に変化に対する仕事量を軽減するように作動するだけなので、しゃっくりや心拍動によるアーチファクトに対して影響されることが少ない。しゃっくりがある患者に適した人工呼吸モードはPAV以外に考えられない。
3)回路リーク
a)吸気相
吸気相において、患者回路や気管チューブのリークに関してはPAVの方が影響を受けやすい。人工呼吸器は、患者の吸気かリークかは区別できないので、リークがあるとより大きな吸気努力と誤認し、結果的にアシスト過剰(overassist)を引き起こす。PCVやsCMVに代表される従来の換気モードでは、リークがあると換気量が減少するが、PAVは換気量が増大する数少ないモードのひとつである。この点に関しては、BiPAP VisionやV60において、高度のリーク補正対策がなされていると聞く。
b)呼気相
一方、呼気相においてもPEEPがあれば、PAVはリークで誤作動を起こす潜在性がある。この対策は、PAVの吸気の開始にトリガー条件を付加することであるが、これは逆に、2)トリガー機構の誤動作に対するPAVの利点についての論点への大きな矛盾である。
4)RunAway
これはPAV特有の問題であるが、ゲインが1に近いほどRunAwayが起きやすい。初期の頃はゲインを0.5以下が望ましいと聞いていたが、最近ではゲインを0.8にするのを推奨している。しかし、この根拠は経験的なものであり、1)パラメーターの設定が明快であるという論点に対して、大きな疑問を感じる。逆にいえばゲインの設定方法に関して、誰もが納得できる明快なプロトコールはない。また、ゲインの範囲が必然的に制限されているので、吸気補助能力にも制限がある。したがって臨床応用に限界があり、PAVが抱える原理上の限界である。PAV理論が単純なモデル理論を基に構成されている点にも原因がある。
5)Auto-PEEP
PAVはAuto-PEEPに対しても呼吸仕事を補助するように作動するので、結果的にAuto-PEEPを生じにくいと言われている。
6)適応範囲
PAVでは呼吸中枢の働きが正常であることが前提である。したがって働きが正常でない患者は禁忌になる。さらに、適切なPAVで管理されているにもかかわらず、呼吸性アシドーシスが進行するような患者はPAVに適さない。症例によってはCMVの方が呼吸仕事量が少ないので(調節呼吸にしてしまえばゼロである)、PAVを心不全や狭心症のように仕事量の増大が弊害をもたらす可能性のある疾患に適応するには注意が必要である。
7)気道内圧
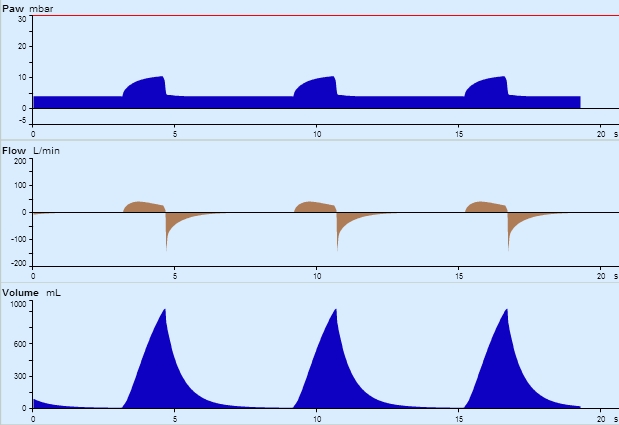
もしPAVのゲインが1に限りなく近く、患者の換気能力が限りなく0に近ければ(0であればPAVやPSVが成立しない)、理論的に、同一の一回換気量に対して、4つの換気モード(PCV, PSV, PAV, CMV)のピーク気道内圧は同一である。人工呼吸器が負担する仕事量は同じであれば、PCVはPAVの平均気道圧で換気できるので、PCVの方がピーク気道圧が低い。患者の換気能力がある程度ある状態を想定した場合でも、患者が負担する呼吸仕事量が同じであれば、人工呼吸器が負担する仕事量も同じなので、やはりPCVの方がPAVよりピーク気道圧が低い。一方CMVに対しては、患者の換気能力が高いほどPAVのゲインを低く設定できるので、PAVはCMVに比してゲインに応じて最高気道圧は低くなる。PAVはCMVに比して最高気道内圧は低いであろうが、PCVやPSVより低いとは言えない。 呼吸仕事量は圧・量曲線で囲まれた面積で表される。PAVでの仕
事量はA+Bの領域である。PCVでの仕事量はA+Cの領域である。両者の面積は等しい。勿論、PCVの方がピーク気道圧は低くなる。PCV圧はPAVの平均気道圧に等しい。
8)換気の特性
PCVやPSVは、PAV論理で表現すれば、吸気初期にゲインが1を大きく超えていて、やがて経時的に低下してくるが、吸気終末に近づいてようやくゲインが1前後の値になるモードである。したがってPCVやPSVでは吸気初期にはオーバーアシストになっているので、PAVに比べて吸気初期の吸気量が多い。したがって、PCVやPSVでは吸気終了をどの時点で行うかについての重要度は比較的低いという特性があり、吸気終了条件の決定方法が曖昧という欠点はそれ程深刻な問題にならない。
9)酸素化能
酸素化能の改善について比較した臨床データーがないが、理論的には圧換気の方が有利であろうと予測される。
10)自発呼吸への同調性
PSVは、吸気終了認識条件、吸気立ち上げ時間の調節機構などが改良されつつあり、自発呼吸との同調性が向上しつつある。同じく、PAVも改良中であるので、両者を一概に比較するのは無意味である。最近ではNAVA(Maquet社)との比較が注目されている。
5.PAVの評価
1)他の換気モードとの比較
PAVは色々な人工呼吸器に搭載されて臨床応用が容易になったが、必ずしも高く評価されているとは言い難い。つまり、理論的な興味はそそられるが、従来の換気モードに対して絶対的な優位性を認められないのが真相である。理由として、臨床応用できる範囲が限定されている、ゲインの決定方法が明快でない、RunAwayの問題が解決されていない、リークに対する誤動作が解決されていない、PCVのように酸素化能での優位性がない、自発呼吸の存在を前提とする換気法である、呼吸中枢の意思に対して忠実なスレーブとして作動する換気モードである、原理的に出力が入力に還る不安定な制御システムである、などが問題点で、必ずしも従来の換気モードがかかえる本質的な問題点を解決する根本性がない。PAVモードは多くの場合、オプション扱いであり、当然のごとくライセンス料を上乗せされたコストが必要になる。他の換気モードと比して臨床上の優位性をなかなか見いだせていないために、高額なオプション費用を払ってまでPAVを購入するユーザーは少ない。しかも他の換気モードにはライセンス料がほとんど不要なため安価に利用できる有利さがある。しかしBennett社のPAV+は一般的なPAVの欠点に対して意欲的に対処したモードなので臨床上の有益性が高い。また、設定のパラメータも明快である。(Benett840・PAV+の解説を参照)
2)臨床適応
PAV換気が成功するには、以下の条件が必須である。(1)患者の呼吸中枢が正しく機能している。(2)患者の換気能力ある程度温存されていて、呼吸中枢の働きを反映する能力がある。(3)人工呼吸器は患者の呼吸仕事を正確に把握できている。(1)(2)の条件は人工呼吸療法を必要とする多くの患者には厳しい条件である。(3)は人工呼吸器に厳しい条件である。逆説的に言えば、人工呼吸療法を受ける患者が、これらの条件は達成できるならば、最初から、人工呼吸療法を必要とする程度が低かったとも言える。PAVでは患者の換気要求(換気量)が多いほど換気補助が増える特性がある。これと同じ特性を持つ換気モードはAAV(Adaptive Assist Ventilation)としてアイカ社のWEANYに搭載されていた。このモードでも患者の換気要求が多いほどSIMV回数が増加し、また一回換気量も増加する。一方、対照的な哲学で構築されているのがEMMVである。これは設定した分時換気量に対して患者が達成できていない分を機械が補助する換気モードである。EMMVでは患者の換気要求(換気量)が増加すると換気補助が減少する。つまり、PAVやAAVでは換気量を維持する責任は患者の呼吸中枢にあり、EMMVでは人工呼吸器にある。したがって、作動理論からすると、PAV単独では、呼吸筋が何らかの原因で障害を受けているが呼吸中枢や呼吸器には障害がない患者(例えば筋ジストロフィーなどの患者)は、良い適応であろう。慢性肺疾患で呼吸中枢や呼吸筋には障害がないが、肺でのガス交換能に障害がある患者は、PAVとの相性はよいかも知れない。しゃっくりのある患者には現時点ではPAVを用いるのが最良かもしれない。しかし、治療効果や、肺に対する低侵襲という観点では、PCVのような圧換気の方が合理的であろう。今後は、PAVと他の換気モードを組み合わせるモードによって臨床適応を拡大すべきであろう。例えばEMMV+PAV、SIMV+PAV、そして、VAPSのようにPAVとPSVを同時に開始するPAV/PSVはそれぞれの欠点を補える可能性をもつ。
{kind=link}
{kind=link}